
Nguồn: Paul Scharre, “Commanding the Swarm”, War on the Rocks, 23/3/2015.
Biên dịch: Lê Thanh Danh | Hiệu đính: Nguyễn Thế Phương
Kỳ 1: Công nghệ rô-bốt trong quân sự: Tự vận hành là gì? | Kỳ 2: Rô-bốt tham chiến: Ưu thế của số lượng | Kỳ 3: Các đàn rô-bốt và tương lai của chiến tranh | Kỳ 4: Yếu tố con người trong chiến tranh rô-bốt
Ngày nay, các phương tiện không người lái chủ yếu đều được kết nối từ xa, với chỉ một người thực hiện các thao tác điều khiển. Tuy nhiên, điều này sẽ thay đổi trong tương lai. Các phương tiện này sẽ ngày càng được tích hợp các chức năng tự hành nhiều hơn, với con người đóng vai trò chỉ huy ở mức độ nhiệm vụ. Điều này cho phép một cá nhân có khả năng điều khiển cùng lúc nhiều phương tiện, dẫn tới hỏa lực tác chiến lớn hơn trong khi nguồn nhân lực không thay đổi. Tuy nhiên, các bầy đàn số lượng lớn sẽ đòi hỏi sự chuyển đổi lớn hơn rất nhiều trong mô hình chỉ huy và kiểm soát.
Hiện nay, các nhà nghiên cứu tại Trường Hải quân Sau đại học đang xây dựng một mô hình không chiến giữa các bầy đàn rô-bốt với số lượng “50 chọi 50”. Các nhà nghiên cứu tại đại học Havard cũng đang tạo ra một bầy đàn với hơn một ngàn rô-bốt đơn giản, phối hợp tạo nên các đội hình đơn giản. Khi số lượng các nhân tố trong một bầy đàn tăng lên, quá trình điều khiển của con người phải nhanh chóng chuyển đổi sang điều khiển toàn bộ bầy đàn như một chỉnh thể thống nhất, hơn là điều khiển từng cá thể riêng biệt.
Cách thức thực hiện quyền chỉ huy và kiểm soát hiệu quả đối với bầy đàn là một lĩnh vực nghiên cứu còn non trẻ nhưng lại rất quan trọng. Làm cách nào để điều khiển một bầy đàn? Có thể đưa ra các mệnh lệnh nào đối với bầy đàn? Làm cách nào để cân bằng giữa các mục đích xung đột lẫn nhau, như khả năng tối ưu hóa, khả năng phán đoán, tốc độ và khả năng phân tán mạnh mẽ?
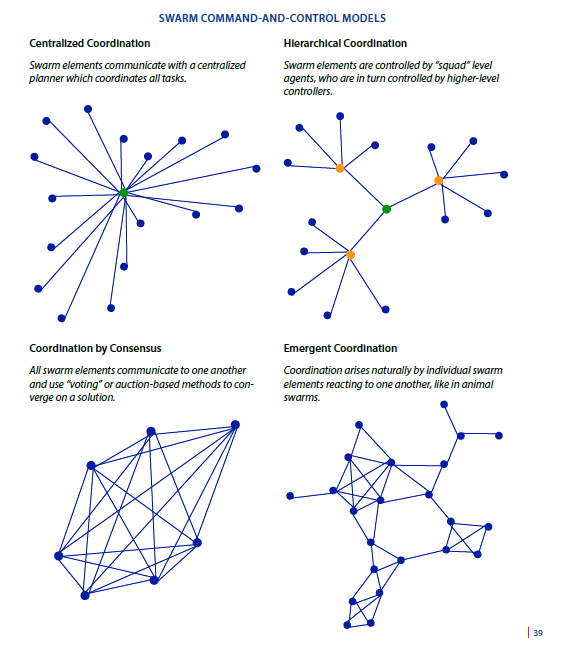
Các mô hình chỉ huy và điều khiển bầy đàn mang tính khả thi, xếp theo thứ tự từ kiểm soát ở mức độ tập trung hóa cao đến kiểm soát ở mức độ phân tán cao, bao gồm:
- Kiểm soát tập trung hóa (Centralized Control): Các nhân tố bên trong bầy đàn chuyển thông tin về một phần tử trung tâm. Phần tử này sau đó sẽ giao nhiệm vụ cho từng cá thể riêng biệt.
- Kiểm soát có trật tự thứ bậc (Hierarchical Control): Các cá thể của bầy đàn được kiểm soát theo cấp độ từng “nhóm” (squad), mỗi nhóm lại được kiểm soát bởi một cấp độ điều khiển cao hơn, và cứ thế tiếp tục.
- Phối hợp bằng sự đồng thuận (Coordination by consensus): Các nhân tố bên trong bầy đàn liên lạc với nhau và cùng tổng hợp để đưa ra giải pháp, thông qua bầu chọn hoặc lựa chọn phương án tối ưu.
- Phối hợp ứng biến (Emergent coordination): Sự phối hợp được thúc đẩy một cách tự nhiên khi các nhân tố của bầy đàn tương tác với nhau, giống như bầy đàn động vật
Mỗi mô hình trên đều có những ưu điểm khác nhau, và có thể được ứng dụng tùy vào từng trường hợp. Các bầy đàn phân tán triệt để có khả năng tìm ra giải pháp tối ưu cho các vấn đề phức tạp, như cách đàn kiến tìm được đoạn đường ngắn nhất để vận chuyển thức ăn về tổ. Thế nhưng, việc kết hợp để tìm ra một giải pháp tối ưu đòi hỏi nhiều phép thử và tốn nhiều thời gian. Các mô hình điều khiển tập trung hóa hoặc tuân theo thứ bậc có thể cho phép bầy đàn tổng hợp các phương án tối ưu, hoặc ít ra là “vừa đủ tốt”, một cách nhanh chóng.
Tuy nhiên, những mô hình này lại đòi hỏi băng thông rộng hơn để truyền tải dữ liệu về một phần tử trung tâm, vốn sau đó chuyển thông tin ngược trở lại bầy đàn. Các hành động dựa trên đồng thuận, thông qua cơ chế bầu chọn hoặc lựa chọn phương án tối ưu, có thể được sử dụng khi các hệ thống liên lạc băng thông hẹp xuất hiện giữa các nhân tố trong bầy đàn. Khi không tồn tại khả năng liên lạc trực tiếp, các cá thể trong bầy đàn vẫn có thể dựa vào hệ thống liên lạc gián tiếp, thông qua cơ chế phối hợp ứng biến. Điều này có thể được thực hiện bằng cơ chế phối hợp giám sát, tương tự cách thức các loài động vật tập hợp hoặc di chuyển thành bầy đàn, hoặc cách thức liên lạc “phối hợp đồng bộ không trực tiếp” (từ gốc: Stigmergic Communication – ND) bằng cách thay thế môi trường xung quanh, tương tự như cách các đàn mối xây dựng những công trình phức tạp. Thật ra, thuật ngữ “stimergy” cũng được sáng tạo vào năm 1950 bởi một nhà sinh vật học người Pháp nghiên cứu về mối.
Các bầy đàn phân tán cao sở hữu sức mạnh và khả năng thích ứng
Mô hình điều khiển tập trung hóa không phải lúc nào cũng là phương pháp tối ưu, ngay cả khi có hệ thống liên lạc băng thông rộng, bởi vì các kế hoạch chi tiết và phương hướng cụ thể vẫn có thể thất bại trong một môi trường chiến đấu luôn thay đổi nhanh chóng. Phương thức kiểm soát phân tán – thông qua “các chỉ huy nhóm” (squad commanders), cơ chế đồng thuận dựa trên bình bầu, hoặc chiến lược phối hợp ứng biến – đều có lợi thế trong việc đưa ra các quyết định bám sát với tình hình chiến trường.
Điều này vừa có thể đẩy nhanh tốc độ phản ứng tức thời, vừa khiến cho đội hình ứng phó tốt hơn trong trường hợp thông tin liên lạc bị gián đoạn. Từng cá thể của bầy đàn sẽ phản ứng với tình hình xung quanh và tuân theo mục đích của người chỉ huy cao hơn. Đây chính là đỉnh cao của việc thực thi mệnh lệnh một cách phân tán. Không dựa vào sự điều khiển từ trung tâm, bầy đàn sẽ không dễ dàng bị tê liệt hoặc bị tấn công đồng loạt, mặc dù từng cá thể trong bầy vẫn có nguy cơ gặp phải rủi ro. Nếu bầy đàn phân tán hóa hy sinh tính tối ưu trong chiến đấu, chúng sẽ có được tốc độ và khả năng phản ứng nhanh hơn. Các bầy đàn có hệ thống liên lạc gián tiếp thông qua cách thức phối hợp đồng bộ không trực tiếp hoặc phối hợp giám sát, giống như các bầy đàn động vật, sẽ hoàn toàn miễn nhiễm với các chiến thuật gây nhiễu liên lạc trực tiếp.
Bầy đàn gồm các cá thể tự hành đơn giản, hoạt động phối hợp dưới một ý chí chỉ huy được tập trung hóa, nhưng lại hoạt động phân tán, sẽ trở nên cực kỳ khó bị đánh bại. Chiến dịch “rải thảm” lính dù trong cuộc đổ bộ Normandy đã không diễn ra đúng theo các kế hoạch của lực lượng đồng minh do bị phân tán. Thế nhưng “thất bại” đó đã mang lại kết quả không ngờ khi quân đội Đức không tài nào phản công “các nhóm nhỏ lính dù” phân tán khắp mọi nơi, và thậm chí chia cắt đội hình của quân Đức. Các chỉ lệnh đơn giản như “chạy đến nơi có tiếng súng và bắn bất kỳ ai không mặc đồ giống mình” có thể trờ thành phương cách cực kỳ hiệu quả để truyền tải ý chí của người chỉ huy, đồng thời tạo không gian cho các giải pháp thích ứng khác vốn dựa vào tình hình trận địa. Tuy nhiên, một bầy đàn phân tán hoàn toàn cũng có nhược điểm. Nó sẽ trở nên cực kỳ khó kiểm soát, bởi vì các hành động cụ thể của bầy đàn sẽ khó có thể dự đoán trước được.
Các mô hình chỉ huy và kiểm soát phải cân bằng được các mục tiêu xung đột nhau
Những sự lựa chọn trong các mô hình chỉ huy và kiểm soát đối với bầy đàn có thể phụ thuộc vào sự cân bằng giữa các tiêu chí mong muốn. Chẳng hạn như tốc độ phản ứng, khả năng tối ưu hóa, khả năng dự đoán, khả năng phân tách, và rủi ro tổn hại tới khả năng liên lạc. Mô hình chỉ huy và kiểm soát tối ưu cho từng trường hợp cụ thể sẽ phụ thuộc vào nhiều nhân tố, bao gồm:
- Cấp độ trí thông minh của các cá thể trong bầy đàn, tương quan với mức độ phức tạp của nhiệm vụ cần thực hiện;
- Lượng thông tin có được về nhiệm vụ và môi trường trước khi nhiệm vụ bắt đầu;
- Mức độ thay đổi của môi trường trong thời gian thực hiện nhiệm vụ, hoặc mức độ thay đổi của chính nhiệm vụ đó;
- Tốc độ phản ứng cần thiết để thích ứng với những thay đổi về diễn biến và mối đe dọa;
- Mức độ phối hợp giữa các nhân tố trong bầy đàn để hoàn thành nhiệm vụ;
- Mức độ kết nối – cả về băng thông, độ trễ thông tin và độ tin cậy – giữa những nhân tố trong bầy đàn và giữa bầy đàn với người điều khiển;
- Các rủi ro, bao gồm cả khả năng và hệ quả, mà các giải pháp không tối ưu, hoặc có thể là thất bại hoàn toàn, sẽ mang lại.
Bầy đàn tốt nhất sẽ là bầy đàn có khả năng áp dụng mô hình chỉ huy và kiểm soát với quá trình thay đổi của các điều kiện trên chiến trường. Chẳng hạn như sử dụng băng thông để liên lạc khi có điều kiện, nhưng sẵn sàng thích ứng với mô hình ra quyết định một cách phân tán khi không có băng thông. Bên cạnh đó, mô hình chỉ huy và kiểm soát có thể thay đổi trong các giai đoạn khác nhau của chiến dịch, và các mô hình khác nhau cũng có thể được sử dụng cho từng loại quyết định khác nhau.
Sự kiểm soát của con người có nhiều dạng thức
Sự kiểm soát của con người đối với bầy đàn có thể tồn tại dưới nhiều dạng thức. Các chỉ huy là con người có thể xây dựng một kế hoạch tỉ mỉ, rồi sau đó kích hoạt cho một bầy đàn hoạt động, cho phép nó thích ứng với từng sự thay đổi trên chiến trường. Mặt khác, người chỉ huy cũng có thể chỉ cần thiết lập các nhiệm vụ ở cấp độ cao, như “tìm kiếm mục tiêu”, và cho phép các bầy đàn tự quyết định giải pháp tối ưu thông qua mô hình phối hợp tập trung hay phân tán. Người điều khiển cũng có thể thay đổi các mục tiêu của bầy đàn hoặc các giao thức của một đơn vị cá thể để tạo ra hành vi nhất định nào đó. Nếu khối lượng công việc mang tính kỹ thuật trong điều khiển bầy đàn vượt quá năng lực của một cá nhân, nhiệm vụ của con người có thể được chia sẻ bằng cách tách bầy đàn thành các nhân tố nhỏ hơn hoặc phân chia các nhiệm vụ dựa trên chức năng. Ví dụ, một người điều khiển có thể giám sát về độ bền của các phương tiện, trong khi một người khác thiết lập các nhiệm vụ cấp độ cao, và một người khác nữa sẽ chịu trách nhiệm cho phép tiến hành các hành động với mức độ rủi ro cao, như việc sử dụng vũ lực.
Một cơ chế điều khiển hỗn hợp có thể sẽ là mục tiêu cao nhất trong điều khiển bầy đàn, với các mô hình điều khiển khác nhau được sử dụng cho các nhiệm vụ hoặc tình huống khác nhau. Ví dụ, các nhà nghiên cứu, đang tìm hiểu về cách áp dụng các yếu tố thông minh trong trò chơi chiến thuật thời gian thực, đã phát triển một mô hình trật tự thứ bậc bao gồm nhiều phần tử nắm các quyền kiểm soát tập trung hóa. Các phần tử ở cấp độ nhóm điều khiển chiến thuật và sự phối hợp giữa các cá thể riêng biệt. Các phần tử ở cấp độ chiến dịch điều khiển việc điều động tác chiến và ra nhiệm vụ cho nhiều nhóm khác nhau. Các phần tử ở cấp độ chiến thuật kiển soát việc lên kế hoạch tổng thể, chẳng hạn như thời điểm nào thì có thể tấn công. Về mặt nguyên tắc, sự hợp tác ở mỗi cấp độ có thể được thực hiện thông qua các mô hình khác nhau, giữa cách ra quyết định phân tán hay tập trung, quyền kiểm soát của con người hay máy móc. Ví dụ, phối hợp giữa các nhóm chiến thuật có thể được thực hiện thông qua mô hình phối hợp ứng biến; các phần tử mang tính tập trung hóa có thể tiến hành phối hợp ở cấp độ chiến dịch; và người điều khiển có thể đưa ra các quyết định mang tính chiến lược ở cấp độ cao hơn.
Để tối ưu hóa công dụng của các bầy đàn, người điều khiển cần được huấn luyện để hiểu được hành vi và giới hạn của bầy đàn tự hành trong môi trường thật, đặc biệt là khi bầy đàn cần thực hiện các hành vi mang tính ứng biến tức thời. Người điều khiển cần phải biết được khi nào thì cần can thiệp để điều chỉnh các hệ thống tự hành, và sự can thiệp đó có mang đến các hệ quả tối ưu hay không.
Các nghiên cứu cơ bản về bầy đàn rô-bốt vẫn đang được thực hiện trong các phạm vi học thuật, chính phủ, và doanh nghiệp. Bên cạnh việc tìm hiểu về các hành vi của bầy đàn, cần có nghiên cứu sâu hơn về sự phối hợp giữa con người và máy móc đối với các bầy đàn. Làm cách nào để truyền tải tới người điều khiển tình trạng của bầy đàn một cách đơn giản và không gây ra quá tải về kỹ thuật? Thông tin nào là tối quan trọng đối với những người điều khiển và thông tin nào là không quan trọng? Con người sẽ đưa ra các hình thức kiểm soát hay mệnh lệnh gì đối với một bầy đàn?
Chẳng hạn, một người điều khiển có thể ra lệnh cho một bầy đàn phân tán, tập hợp, bao vây, tấn công, né tránh v.v… Hoặc con người có thể điều khiển một bầy đàn đơn giản bằng cách mô phỏng “dấu hiệu mùi hương” trên chiến trường, chẳng hạn như làm tăng tính thu hút của mục tiêu và làm giảm tính thu hút của các mối đe dọa (thông qua lập trình dấu hiệu nhận biết đơn giản, đã nêu trong ví dụ về trận Normandy – ND). Để khai thác sức mạnh của các bầy đàn, quân đội sẽ không những cần phải thử nghiệm và phát triển các công nghệ mới, mà còn phải điều chỉnh tối đa các yếu tố như công tác huấn luyện, học thuyết, và các cấu trúc tổ chức để thích ứng với một mô hình kỹ thuật công nghệ mới.
Paul Scharre là nghiên cứu viên và Giám đốc Sáng kiến 20YY Warfare (20YY Warfare Initiative) tại Trung tâm An ninh Hoa Kỳ mới (CNAS). Ông cũng là tác giả của báo cáo mới đây của CNAS, Robotics on the Battlefield Part II: The Coming Swarm. Ông là cựu quân nhân của Trung đoàn biệt kích số 75 từng phục vụ tại Afghanistan và Iraq.
Đón đọc kỳ cuối cùng: Làm thế nào để chống lại chiến lược bầy đàn rô-bốt
